
Entregas:
- Colisiones I: Introducción, requisitos y alternativas
- Colisiones II: Diseño general de STC
- Colisiones III: La clase Shape y Collision Dispatching
- Colisiones IV: Tests de colisión
En la primera entrega de la serie de artículos sobre el sistema de detección de colisiones de Sion Tower (STC) comenté los requisitos que debía cumplir y las alternativas que valoré antes de decidirme a implementarlo por cuenta propia. En esta ocasión me dispongo a hacer un repaso por el diseño de esta pequeña biblioteca. Tras el diagrama de clases voy a tratar los componentes de forma breve pero individualizada. En posteriores entregas del artículo tendremos espacio suficiente para conocer en profundidad cada clase y algunos puntos relevantes de su implementación.
Diagrama de clases de diseño
El sistema de colisiones de Sion Tower es bastante sencillo y únicamente cuenta con las clases que se muestran a continuación.
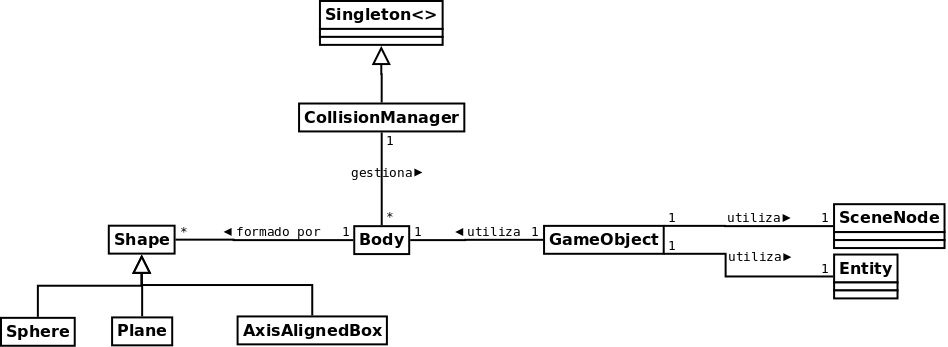
Este primer diagrama sólo muestra las clases y sus relaciones:
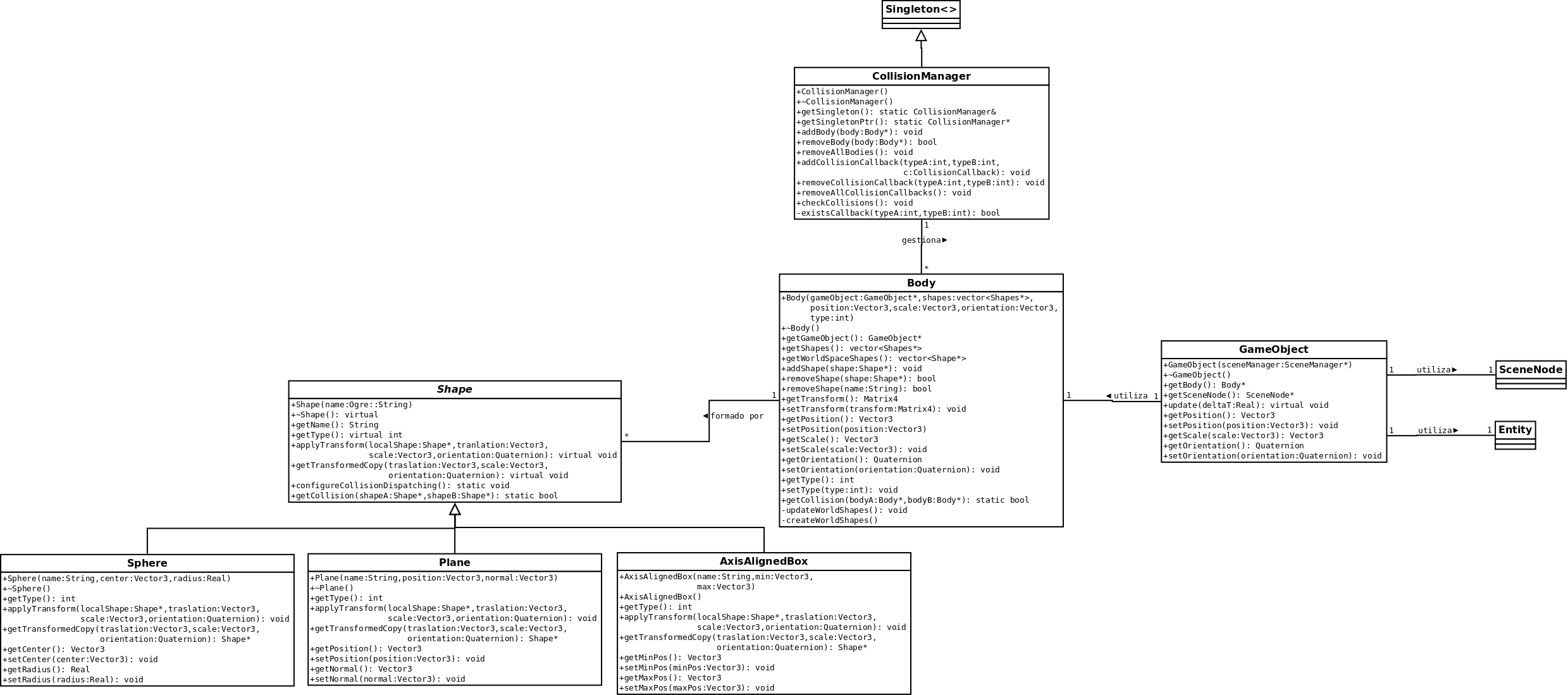
En este segundo diagrama podemos ver los métodos que componen la interfaz de cada clase, haz click sobre la imagen para verlo ampliado.
Componentes
La siguiente lista repasa de forma superficial las responsabilidades de cada clase dentro de Sion Tower Collisions.
- Shape: clase abstracta que modela formas básicas colisionables. Es la encargada del "collision dispatching". Mediante el método estático Shape::getCollision podemos saber si dos formas concretas colisionan sin necesidad de conocer su clase concreta. El sistema detecta los tipos en tiempo de ejecución (RTTI) y elije el test de colisión apropiado de manera eficiente.
- Plane: forma especializada para modelar un plano representado por un punto y un vector normal. Dentro del juego lo utilizaremos para modelar las colisiones del suelo.
- Sphere: forma especializada para modelar una esfera a partir de un punto (centro) y un radio. Nos será de extrema utilidad para modelar el volumen colisionable de los proyectiles mágicos.
- AABB: forma especializada para modelar una caja de colisión alineada con los ejes (Axis Aligned Bounding Box), se representa mediante su punto mínimo y máximo. Será útil para modelar elementos que no roten ya que los AABB pierden mucha precisión en estas situaciones.
- Body: cuerpo colisionable formado por varios objetos Shape y una transformación (translación con respecto al origen, escala y rotación). Representará la parte física de los objetos del juego dentro de la escena (world space). Proporciona el método estático Body::getCollision para conocer si dos cuerpos se interseccionan. Los cuerpos tienen un tipo para poder distinguir entre clases de cuerpos de cara al filtrado de colisiones.
- CollisionManager: registra todos los cuerpos de la escena y permite detectar colisiones entre ellos. Habilita el registro de callbacks para ser informados de colisiones entre dos tipos concretos de cuerpos.
- GameObject: encapsula el aspecto colisionable (Body) junto con el visual (Ogre::Entity – Ogre::SceneNode) de los elementos de juego. Los elementos que no tengan un comportamiento definido serán instancias de esta clase. Aquellos que deseen un comportamiento concreto deberán heredar de GameObject.
Básicamente esto es lo que proporciona STC, no es mucho pero es fácil de extender y es independiente del resto de componentes de un videojuego.